Brand
:
Robotistan
Product Code
:
15232
Size daha iyi hizmet sunabilmek için çerezleri kullanıyoruz.
Web sitemizde gezinme deneyiminizi geliştirmek, size kişiselleştirilmiş içerik ve hedefli reklamlar göstermek, web sitesi trafiğimizi analiz etmek ve ziyaretçilerimizin nereden geldiğini anlamak için çerezleri ve diğer izleme teknolojilerini kullanıyoruz.



Out Of Stock
Notify me when its in stock





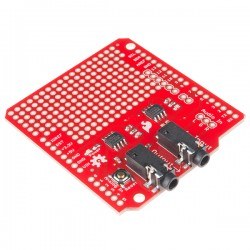

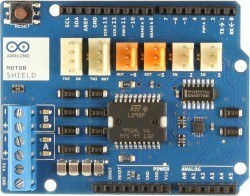
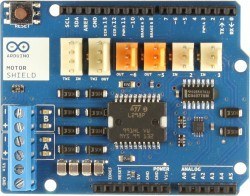
Clone version of Original Arduino Motor Shield. Compatible with all of original shield's libraries and code. Robotistan always recommends you to use original products.
Motor Shield is a full- bridge motor driver based on L298 motor driver integrated circuit. It can drive two seperate 2A DC motor or one 2A step motor. You can control your motor's speed and direction independently of each other. Also with Current Sense feature you can measure the currents of each motor seperately. For fast prototyping there are 6 connectors on the card.
Technical Specifications:
| Working Voltage | 5V-12V |
| Motor Controller |
L298P, drive 2 DC motors or 1 step motor |
| Max. Current |
2A per channel (with external feeding) |
| Current Sense |
1.65V/A |
| Motor Stop Features |
Stopping by cutting power or break feature |
Power:
Motor Shield can only be feeded from an external source. Because L298 integrated circuit has 2 seperate power connections, one for the logic and the other one is for motor feeding. Necessary motor current mostly will be over the max. current which can be given by USB.
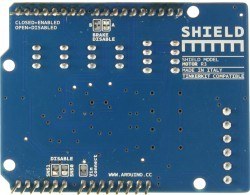
Vin terminal on driver is connected to Arduino's Vin pin through header. It means that when power connection is made through terminal, Arduino absorbs power on Vin pin and decrease it to 5V with its regulator. Therefore there is no need to use two different power source. But as you know Arduino's Vin pin accepts input between 7V and 12V. So if the input voltage on driver card is 5V- 7V hence it is smaller than regulators minimum value, Arduiono will not work perfectly. To prevent this situation, there is a "Vin Connect" solder jumper at the bottom of driver card. This jumpers connects Vin terminal and Arduino's Vin pin. If driver's input voltage is between 5V- 7V, the thin road in the middle of solder jumper is scrached with a knife and Vin and Arduino's Vin pin will be seperated, Arduino starts working with an external 5V. Later, jumper can be repaired by soldering. If driver's input voltage is between 7V- 12V, jumper can stay as it is and card can be used.
Input and Output:
Motor shield has two independent channel named A and B. Each of this channels can be controlled by 4 Arduino pins. In total there are 8 pins used by shield. These channels can drive 2 DC motor seperately and 1 unipolar/ bipolar step motor together.
Shield pin useage table:
| Function | Channel A Pin | Channel B Pin |
| Direction | D12 | D13 |
| PWM | D3 | D11 |
| Brake | D9 | D8 |
| Current Sensing | A0 | A1 |
If you do not need brake and current sensing features, you can cancel them just by cutting solder jumpers under the card. This way you can control motor with two pins each.
Additional sockets and termianls on card are listed below:
- Terminals: For motor and power connection
- White connectors: For Analog inputs, connected to A2 and A3
- Orange connectors: For PWM output, connected to D5 and D6
- 4 pinned white connectors: I2C (TWI) pins, one can used as input and other as output
Motor Connections:
You can use 2 brushed DC motor by connecting them to the Channel A and Channel B terminals on card. This way you can control motor direction by making DIR A and DIR B pins HIGH or LOW, motor speed by changing fullness rate of PWM A and PWM B pins. When Brake A and Brake B pins are HIGH, motors stop immediately. Brake feature is much more efficent than cutting motors power (changing PWM values as 0) . By reading SNS0 and SNS1 analog inputs, current on each motor can be known. Each channels gives analog voltage output directly proportional with motor's current. Those outputs can be read on A0 and A1 pins. For compatibility those outputs are limited with max. 3.3V. So while your motors's currents are 2A, from connected pin you can get max. 3.3V output, you can do your calibration according to this.
Documents: